
CoRL 2018
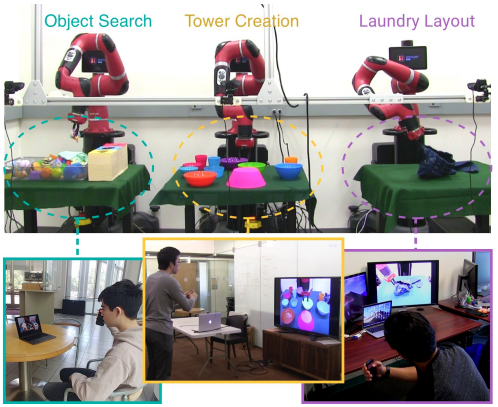
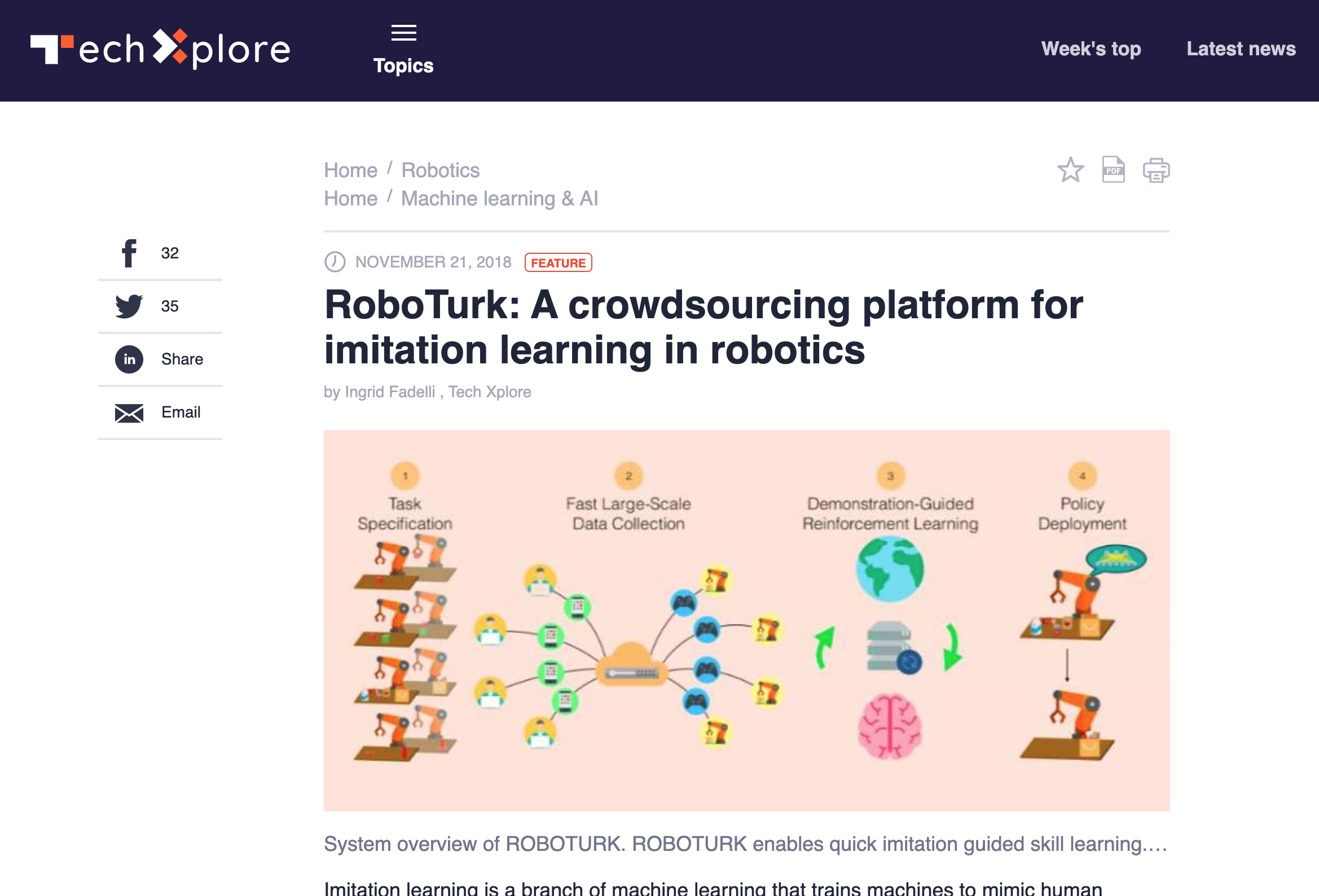
ROBOTURK: A Crowdsourcing Platform for Robotic Skill Learning through Imitation
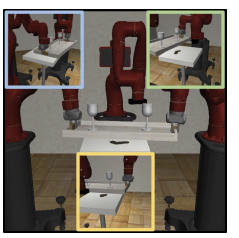
Initial RoboTurk system with a focus on simulation